MUJINコントローラを既存のロボットメーカーのロボットにつなげる場合には、メーカーコントローラは、中の電源部分のみを使います。ただ、カスタマイズする場合には、電源とMUJINコントローラを箱に入れて、一つのコントローラにすることもあります。Androidみたいな存在とはこのようなことです。
ティーチレスというのは、見えた対象に対して勝手に動くものなので、同じ動きは一回もありません。工場で荷物を積み込む「ばら積みピッキング」なら、従来はティーチングで1年以上かかっていましたが、MUJINの場合は3週間でできます。
そのため、毎回違うものを扱う場合にも対応できるので、今まで産業用ロボットが扱えなかった物流や食品、自動車部品整列などでも自動化率がアップするのです。MUJINの売り上げは60%が物流で、40%が自動車です。特に物流はMUJINだけが対応できると自負しています。何万点も扱うため、ティーチングありきでは無理があるのです。
--最高技術責任者(CTO)のRosen Diankov氏との出会いから、起業までの流れをお話いただけますか。
私はもともとイスカルという、工作機械の中にある、鉄を削る切削工具のメーカーにいました。そこで働いていた2009年に国際ロボット展で手伝いをすることになり、Rosenに出会ったのです。彼の動作計画技術は当時から有名でしたが、使われていたのは産業用ではないサービスロボットでした。
ただ、Rosenはサービスロボットの世界では「デモンストレーションをやって終わり」の繰り返しで、いつ自分の技術は世の中で役立つんだと思っていたようでした。そこで、産業用ロボットの世界にいた僕に声をかけてきたのです。最初は正直、あまり乗り気でなかったのですが、2010年に彼が東京大学にポスドクの特別研究員として日本に来て、会えないかと言ってきました。カフェで65ページもある彼の博士論文をプレゼンテーションされたときから検討を始め、ビジネス化できそうなところまでアイデアが固まりました。
ビジネス化を目指してロボットメーカーに意見を聞こうと思ったのですが、日本のロボットメーカーは大手企業になるので、いきなり2人で行っても話ができるかもわからない。そこで米国に行ったところ、ロボットメーカー各社の現地法人の社長に会えて、方向性が固まりました。日本に帰ったら、聞きつけた会社からの問い合わせが増え、デンソーなどが気に入ってくれたこともあり、2011年の国際ロボット展に参考出展として出させてもらえることになりました。そこで、法人として出るために2011年7月に登記し、会社としては2012年から始まりました。
--投資を受けている先として、東京大学エッジキャピタルがありますが、どういった背景があるのでしょうか。
いろいろなベンチャーキャピタルを回って、数社が手を挙げてくれました。そのうちの一社として選んだのが、たまたま東京大学エッジキャピタルだったのです。よく「東大出身ベンチャー」と言われるのですが、Rosenがポスドクの時に所属していた以外、東大出身者はしばらくいませんでした。
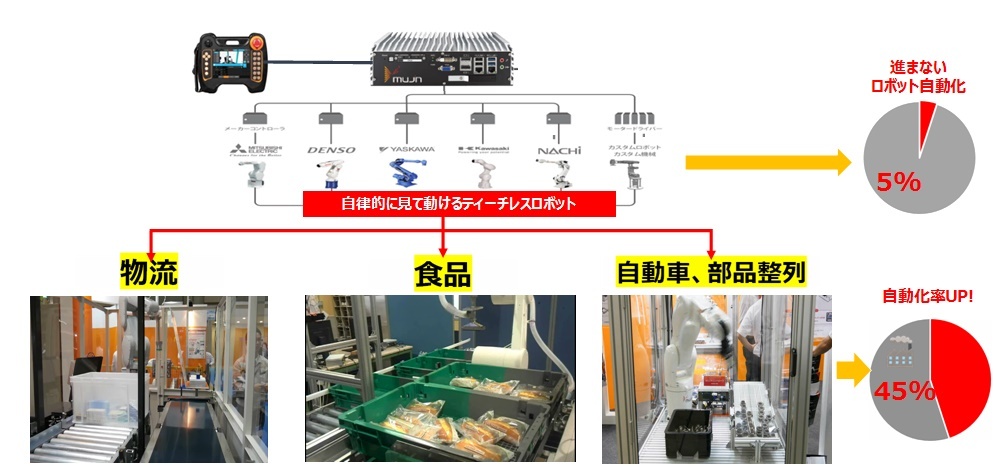
MUJINコントローラによって工場のロボット化をアップさせる