インフラ向けロボットを開発・販売するイクシスと大手総合建設会社の大成建設は、Building Information Modeling(BIM)情報とロボットを連携させた施設点検の共同実証を実施した。イクシスが6月14日に発表した。
今回の共同実証では、イクシスが開発した「i-Con Walker」技術を活用し、大成建設が運用しているオフィスでロボット実機を稼働させた。実証項目は、BIMデータを活用したロボットの「自律走行」と「施設内点検」の2つだ。

ロボットが点検対象のドアに正対して写真撮影している様子
i-Con Walkerは、BIM/Construction Information Modeling(CIM)とロボットの双方向連携プラットホームで、BIM/CIMソフトウェアで自動巡回ロボットの行動計画を設定することができ、かつ自動巡回ロボットが現場環境から取得した情報をBIM/CIMソフトウェアのデータに反映できる仕組みとなっている。
最近は、インフラ施設の老朽化や点検技術者の不足からロボットによる施設点検の期待が高まっている。その一方、ロボットの自律走行には、事前にロボットを手動走行させて走行環境マップを作成する必要があった。また、施設内点検を行う場合は図面から点検する設備を抽出したり、点検タスクをロボットへ指示したりと、煩雑な作業を要していたという。

実際に撮影された写真
i-Con Walkerの活用で、建築工事が完了した際の図面から作成したBIMデータを基に施設内設備の点検経路を自動生成することができ、ロボットの自律走行につながった。さらに、施設内点検を行う際も、BIMの部材情報を活用することでロボットの自動巡回による点検を可能とした。タスクを指定することで写真撮影もでき、点検対象となる設備の状態もBIMソフトウェアで確認することができる。
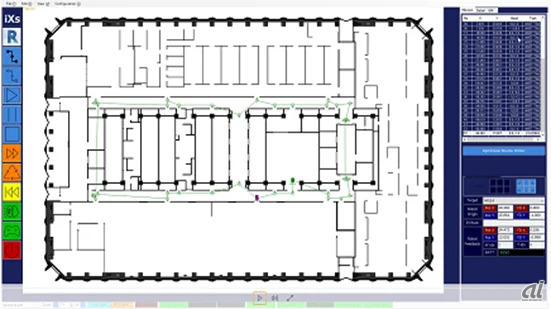
BIM登録情報を基にして自動生成された施設内設備の点検経路
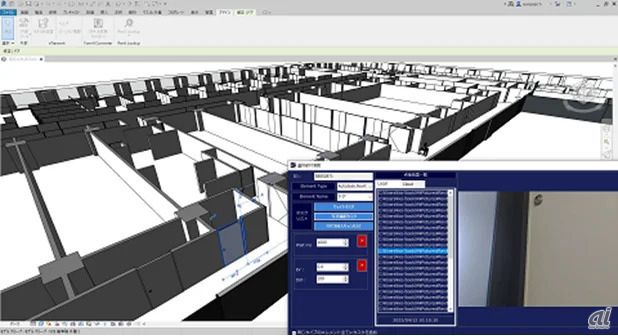
点検後に、BIMソフトウェアで撮影写真を確認する様子
今回の実証を通して、BIMの登録情報とロボットを連携させた施設内点検の実現性が確認されたという。イクシスは今後も、大成建設と共同で設備点検ロボットとBIMを連携させた新たなデジタルツインの実現に向けて検討を重ねていくつもりだ。





