産業用ロボットアーム制御ソフトウェア「クルーボ」を販売する株式会社チトセロボティクス(本社:東京都文京区、代表取締役社長:西田亮介)は、お客様から過去のビジュアルフィードバック制御システムの実装例について、情報公開してほしいとのご要望を受け、当社創業前の研究データの一部を一般公開いたします。
【公開の経緯】
当社は立命館大学理工学研究科運動知能研究室(川村研究室)の研究成果であるロボットアームのビジュアルフィードバック制御技術を中核として創業いたしました。創業までに研究室で開発していた当時のロボットシステム実装例は、現在でもお客様現場の自動化を実現するシステムインテグレーションの参考にしていただけると考えております。
お客様から過去のビジュアルフィードバック制御システムの実装例について、情報公開してほしいとのご要望を受け、当社創業前の研究データの一部を一般公開いたします。
【研究データ】
ビジュアルフィードバックでライトニングコネクタの挿入
[動画: (リンク ») ]
ビジュアルフィードバックでUSBメモリの挿入
[動画: (リンク ») ]
技術ポイント1:キャリブレーションの負担ゼロで、コネクタ挿入動作を実現。
技術ポイント2:3台のカメラ情報を統合して、ロボット手先位置姿勢を高精度に制御。
技術ポイント3:2014年当時のカメラ、コンピュータ、ロボットでも十分な精度を実現。
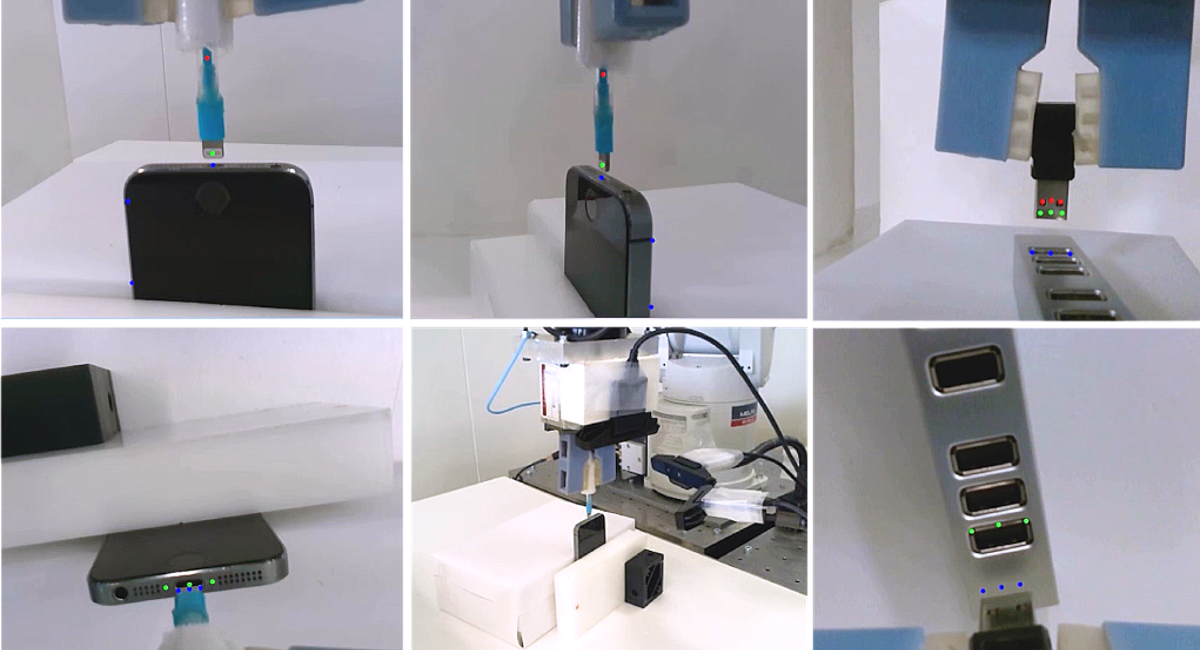
動画では、キャリブレーションされていないロボット、カメラを使用して、コネクタの挿入動作を行っています。ひとつはUSBコネクタ、もうひとつはiPhoneのライトニングコネクタです。
こうしたコネクタは嵌め合いの要求精度が高く、挿入誤差があると薄板金属で構成されるコネクタに無理な力がかかって損傷し、作業を完遂することができません。また、対象物の形状にならう柔軟性を有するハンドは有用ですが、把持物体の位置姿勢が正確に分かり難くくなる問題がありました。
本実験では、作業テーブル上に設置された2台のカメラと、ロボット手先に搭載されたカメラ(ハンドアイカメラ)によってコネクタを把持した、柔軟性を有するロボット手先部を誘導し、挿入動作を実現しています。
一般に複数台のカメラを使用する際にはカメラのレンズ歪み補正や、カメラ間の幾何的なキャリブレーション、カメラ通信タイミングの同期など非常に負担がかかります。
当社製品の産業用ロボットアーム制御ソフトウェア「クルーボ」の先行研究段階において、2014年時点でこうしたキャリブレーションの負担なく、挿入作業を自動化することができていました。
カメラ画像のなかで、コネクタと挿入先の穴をそれぞれ直接認識することで、マーカレスでのビジュアルフィードバック制御を行っています。
【クルーボについて】
■キャリブレーションの負担なしで、20μm精度の制御ができるロボットプログラミングソフトウェア
クルーボはだれでも簡単に、カメラを使った高精度なロボット制御ができるプログラミングソフトウェアです。チトセロボティクスが発明した「キャリブレーションの負担なしで、0.02mmの超高精度制御を実現するロボット技術」を買い切りでご提供します。高度な画像認識と高速なロボット軌道制御が可能なコンピュータも付属し、必要なソフトウェアはすべてインストール済みなので、すぐにお使いいただけます。
以下URLの専用サイトよりお問い合わせください。弊社セールス担当者からご購入についてご案内いたします。ロボットをより効率よく、高精度に制御するために、クルーボとカスタムユニットについて詳細なご説明を差し上げます。
商品名:クルーボ
内容物:制御用コンピュータ一式、ソフトウェア一式、サンプルハンド
価 格:90万円+消費税
URL: (リンク »)
【株式会社チトセロボティクス】
「ロボットをもっと使いやすく、未来のはたらくをデザインする。」をミッションに掲げ、ロボット労働力を活用した生産性の高い社会づくりをすすめるロボットスタートアップです。当社で発明したロボット制御技術を中核とし、ロボットプログラミングソフトウェア「クルーボ」を開発・販売しています。食産業の単調作業・物流倉庫の搬送作業・工場の組立作業といった人手作業が多すぎる現場に対して、ロボット技術による自動化ソリューションをご提供します。
所在地 :〒112-0003 東京都文京区春日二丁目19番1号
事業内容 :ロボット運営プラットフォームの企画・開発・販売
代表取締役:西田亮介
URL : (リンク »)
【公開の経緯】
当社は立命館大学理工学研究科運動知能研究室(川村研究室)の研究成果であるロボットアームのビジュアルフィードバック制御技術を中核として創業いたしました。創業までに研究室で開発していた当時のロボットシステム実装例は、現在でもお客様現場の自動化を実現するシステムインテグレーションの参考にしていただけると考えております。
お客様から過去のビジュアルフィードバック制御システムの実装例について、情報公開してほしいとのご要望を受け、当社創業前の研究データの一部を一般公開いたします。
【研究データ】
ビジュアルフィードバックでライトニングコネクタの挿入
[動画: (リンク ») ]
ビジュアルフィードバックでUSBメモリの挿入
[動画: (リンク ») ]
技術ポイント1:キャリブレーションの負担ゼロで、コネクタ挿入動作を実現。
技術ポイント2:3台のカメラ情報を統合して、ロボット手先位置姿勢を高精度に制御。
技術ポイント3:2014年当時のカメラ、コンピュータ、ロボットでも十分な精度を実現。
動画では、キャリブレーションされていないロボット、カメラを使用して、コネクタの挿入動作を行っています。ひとつはUSBコネクタ、もうひとつはiPhoneのライトニングコネクタです。
こうしたコネクタは嵌め合いの要求精度が高く、挿入誤差があると薄板金属で構成されるコネクタに無理な力がかかって損傷し、作業を完遂することができません。また、対象物の形状にならう柔軟性を有するハンドは有用ですが、把持物体の位置姿勢が正確に分かり難くくなる問題がありました。
本実験では、作業テーブル上に設置された2台のカメラと、ロボット手先に搭載されたカメラ(ハンドアイカメラ)によってコネクタを把持した、柔軟性を有するロボット手先部を誘導し、挿入動作を実現しています。
一般に複数台のカメラを使用する際にはカメラのレンズ歪み補正や、カメラ間の幾何的なキャリブレーション、カメラ通信タイミングの同期など非常に負担がかかります。
当社製品の産業用ロボットアーム制御ソフトウェア「クルーボ」の先行研究段階において、2014年時点でこうしたキャリブレーションの負担なく、挿入作業を自動化することができていました。
カメラ画像のなかで、コネクタと挿入先の穴をそれぞれ直接認識することで、マーカレスでのビジュアルフィードバック制御を行っています。
【クルーボについて】
■キャリブレーションの負担なしで、20μm精度の制御ができるロボットプログラミングソフトウェア
クルーボはだれでも簡単に、カメラを使った高精度なロボット制御ができるプログラミングソフトウェアです。チトセロボティクスが発明した「キャリブレーションの負担なしで、0.02mmの超高精度制御を実現するロボット技術」を買い切りでご提供します。高度な画像認識と高速なロボット軌道制御が可能なコンピュータも付属し、必要なソフトウェアはすべてインストール済みなので、すぐにお使いいただけます。
以下URLの専用サイトよりお問い合わせください。弊社セールス担当者からご購入についてご案内いたします。ロボットをより効率よく、高精度に制御するために、クルーボとカスタムユニットについて詳細なご説明を差し上げます。
商品名:クルーボ
内容物:制御用コンピュータ一式、ソフトウェア一式、サンプルハンド
価 格:90万円+消費税
URL: (リンク »)
【株式会社チトセロボティクス】
「ロボットをもっと使いやすく、未来のはたらくをデザインする。」をミッションに掲げ、ロボット労働力を活用した生産性の高い社会づくりをすすめるロボットスタートアップです。当社で発明したロボット制御技術を中核とし、ロボットプログラミングソフトウェア「クルーボ」を開発・販売しています。食産業の単調作業・物流倉庫の搬送作業・工場の組立作業といった人手作業が多すぎる現場に対して、ロボット技術による自動化ソリューションをご提供します。
所在地 :〒112-0003 東京都文京区春日二丁目19番1号
事業内容 :ロボット運営プラットフォームの企画・開発・販売
代表取締役:西田亮介
URL : (リンク »)
本プレスリリースは発表元企業よりご投稿いただいた情報を掲載しております。
お問い合わせにつきましては発表元企業までお願いいたします。
お問い合わせにつきましては発表元企業までお願いいたします。

