[画像: (リンク ») ]
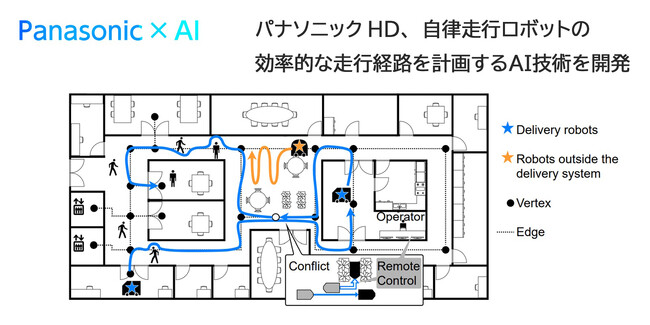
パナソニック ホールディングス株式会社(以下、パナソニックHD)は、人や他のロボットが共存する環境下でもロボットの効率的な走行経路を計画できる技術を開発しました。本技術は、屋内などの限られたスペースで人と多種・複数のロボットが共存する環境における自律走行ロボットの活用シーンを広げる技術として期待されます。
近年、労働人口の減少に伴う労働力不足を背景に、自律走行ロボットの開発・実証が進められています。パナソニックグループでも、実際のオフィスビルで複数ロボットの群管理制御の実証実験(※1)に取り組むなど、ロボットフレンドリーな環境の構築を目指した取り組みを行っています。特にオフィスビルのような狭い屋内環境では、人や別のシステムの制御下にある複数のロボットと衝突することなく、かつ効率的に走行できることが求められます。しかし、ロボットが衝突を避ける際に減速や停止を繰り返すと、そのたびに目的地までの到達時間に遅延が発生します。このような環境で効率的な走行を実現するためには、上記の遅延時間を考慮した非常に難易度の高い走行経路計画技術が要求されます。この課題に対し、パナソニックHDは、ロボットの通過時間に関する確率分布のパラメータをベイズ推論(※2)で遅延が観測されるたびに更新することで、効率的に走行経路を計画可能な技術を開発しました。
本技術は問題設定と先進性が国際的に認められ、マルチエージェント技術のトップカンファレンスであるAAMAS 2023(The 22nd International Conference on Autonomous Agents and Multiagent Systems)に採択されました。2023年6月1日、ロンドンで開催される本会議のポスターセッションで発表します。
※1 [プレスリリース] ロボットフレンドリーな環境構築に向け、複数ロボットの群管理制御の実証実験を実施
(リンク »)
※2 ベイズの定理を用いて、観測データをもとに事象の背後にある確率分布を推定する方法。
全文は以下プレスリリースをご覧ください。
▼[プレスリリース]パナソニックHD、自律走行ロボットの効率的な走行経路を計画するAI技術を開発(2023年6月1日)
(リンク »)
<関連情報>
・発表論文“Online Re-Planning and Adaptive Parameter Update for Multi-Agent Path Finding with Stochastic Travel Times”
(リンク »)
・Panasonic×AI WEBサイト
(リンク »)
・Panasonic×AI twitter
(リンク »)
プレスリリース提供:PR TIMES (リンク »)
本プレスリリースは発表元企業よりご投稿いただいた情報を掲載しております。
お問い合わせにつきましては発表元企業までお願いいたします。
お問い合わせにつきましては発表元企業までお願いいたします。

