SUBARUは、ロボット制御技術を開発するMujinのソフトウェア基盤「Mujinコントローラ」とバラ積みピッキング知能ロボット「PickWorker」を活用し、クランクシャフト鍛造粗材の加工ライン投入作業を自動化した。Mujinが5月15日に発表した。
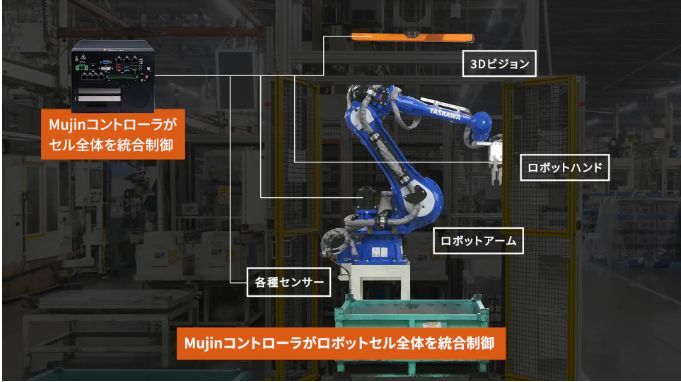
Mujinコントローラは、対象物の形状や周辺環境を高精度で認識する3次元(3D)ビジョンシステム、ロボットハンド/アーム、各種センサー類を一括制御するためのソフトウェア基盤。PickWorkerは、バラ積みされたさまざまな部品のピッキングをプログラミングせずに自動化できる。
SUBARUでは、形状が複雑なクランクシャフト粗材のハンドリングを自動化した。また1つの製品の製造にかけるタクトタイムに悪影響を与えることなくスペースを最小化した。さらにリアルタイムなデジタルツイン環境で知能ロボットセル全体の状態を可視化している。
バラ積みピッキング知能ロボットの稼働イメージ

MujinコントローラとPickWorkerの機能概要
従来、バラ積みされたクランクシャフト粗材を1つずつピックアップして製造ラインに投入する作業は、粗材形状が複雑なこともあって自動化が困難だった。
Mujinコントローラを活用することで、3Dビジョンシステムを使ったリアルタイムな認識結果を基に、瞬時に最適なロボット動作を計算・生成できるようになる。そのため、事前にロボットの動作をプログラミングする必要がなく、複雑な形状の素材を扱う場合も知能ロボットが柔軟に対応できる。
また、Mujinコントローラのデジタルツイン技術により、現実と同じデジタル環境で事前にロボットの動作計画を再現できるため、設計段階で必要なスペースの算出が可能となった。そのため大型のロボットを採用しながらも、必要最低限のスペースでの自動化を実現できた。
万一のトラブル発生時でも、同技術によってセル内のどこで何が起きているのかをリアルタイムに可視化できる。このためリモートサポートによる初期対応や早期の原因追究、トラブルへの対処が可能だ。また、クランクシャフト粗材同士が絡まることでロボットが粗材を2個同時に把持し、一時的に停止してしまう場合に対しても、これを未然に防ぐためのセンサーによる異常検知機能を搭載している。





