日立製作所は5月31日、深層学習を用いたロボット制御技術を開発したと発表した。学習済みの複数の動作を自律的に組み合わせ、状況に応じてロボットの全身制御を行う。動作習得に必要な期間が大幅に短縮でき、動作バリエーションが飛躍的に増大する。
この技術は、人が操作した際の動作を教示データとしてロボットに学習させ、動作データベースに蓄積した学習済み動作の中から必要な動作を組み合わせることができる。従来、人が行っているさまざまな環境での複雑な作業をロボットで実現するには、専門的知識が必要とされる複雑な開発工程の下で膨大な量のプログラミングを行う必要があった。
今回開発した技術はプログラミングが不要で、深層学習を用いて別々に習得した動作を自由に組み合わせることが可能。これにより、人が行っているような上肢(手作業)と下肢(移動)が連携した全身動作や複雑な動作手順が要求される複雑作業をロボットで実現することができるという。
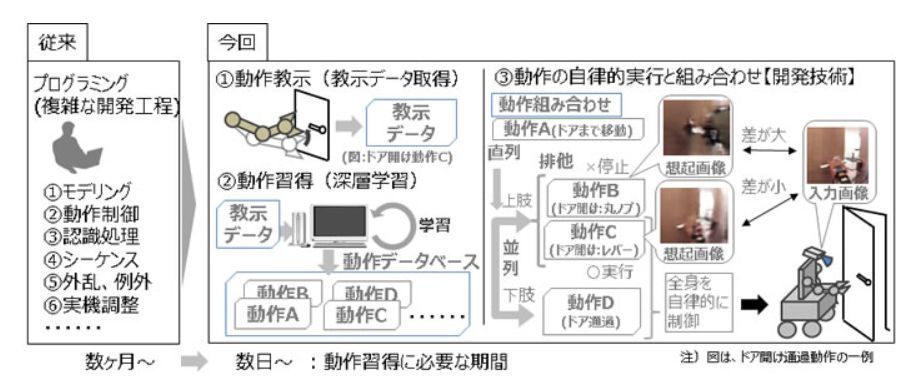
深層学習を用いたロボット制御技術(出典:日立製作所)
動作を組み合わせる技術は、ある動作の完了後に別の動作を実行する「直列実行」、複数候補の動作の中から経験値の高い動作のみを実行する「排他的実行」、複数動作を並列に実行する「並列実行」の3つのケースを指定することが可能にした。
日立では、ドアへの接近動作、ドア開け動作、ドア通過動作を個別に学習し、この学習済み動作の組み合わせる検証を実施した。その結果、動作手順が要求され、かつ移動を伴う全身動作が必要な「ドア開け通過動作」が実現できることを、実際にロボットを動作させて確認した。
また、状況を判断し、学習済み動作を自律的に実行する技術では、ロボットに搭載されているカメラへの入力画像の特徴量を学習・記憶する。記憶済み画像であれば元の画像を想起(再構成)することが可能な深層学習モデルを用いて、ある時点でのロボットの入力画像と想起画像の差が小さい(学習経験がある既知の状況=経験値が高い)場合に、その画像を記憶している学習済み動作を自律的に実行する。