マサチューセッツ工科大学(MIT)の研究者らは米国時間1月30日、ジェンガをプレイできるロボットの開発に関する論文をScience Robotics上で発表した。この昔からあるゲームのルールはかなりシンプルだ。プレーヤーは、直方体のブロックを積み上げて作られたタワーを崩さないようにしながら、ブロックを1本ずつ抜き取り、最上段に積み上げていく。ルールはシンプルながら、ジェンガでは身体的なスキルと精神的な戦略を組み合わせることが必要とされる。このゲームをロボットにマスターさせることができれば、産業界に存在するさまざまな作業上の課題を克服できるようになる。
提供:マサチューセッツ工科大学(MIT)
問題へのアプローチと俊敏性を組み合わたこのスキルセットは、現実世界でロボットによって電気製品などの製造や組み立てを行う際に威力を発揮するはずだ。
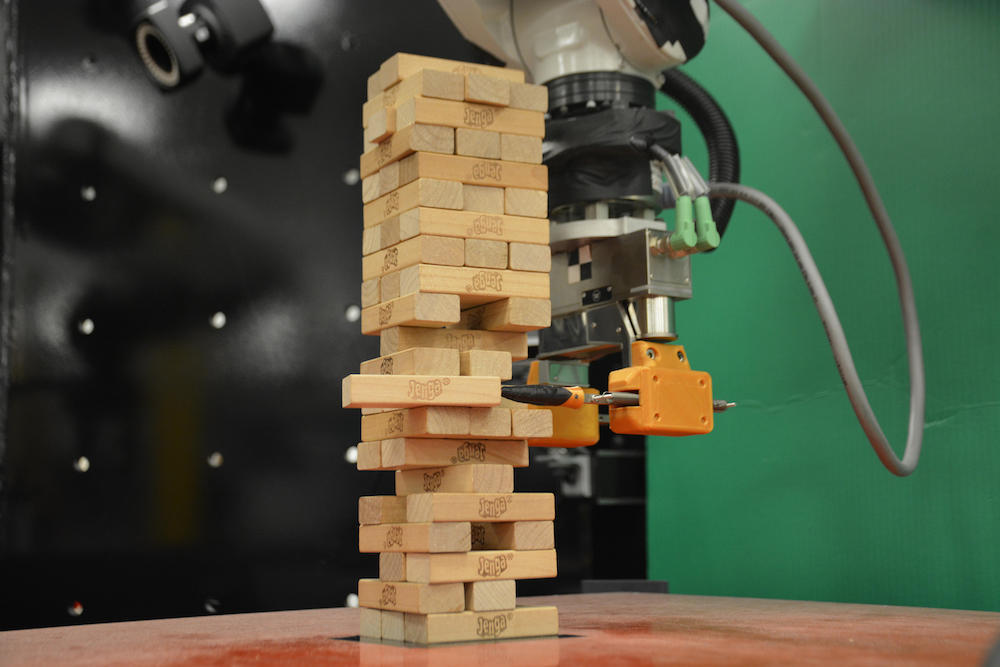
MITのエンジニアらは、ABBのロボットアーム「IRB 120」をカスタマイズし、柔らかい素材で先を覆ったグリッパー(握り部分)と、圧力センサを組み込んだリストカフ(手首部分)、外部カメラを装備した。彼らのロボットは、人間がジェンガをプレイする時と同様に、いずれかのブロックを押してみることで、タワーを崩さずに抜き取れるかどうかを判断する。人間が視覚と触覚を用いるのに対して、ロボットは視覚にカメラを、触覚にリストカフを用いるようになっている。
同論文の主執筆者であるNima Fazeli氏は米ZDNetに対して「このロボットは現実世界におけるセンサ誤差や、不完全な情報に対処する必要がある。ここで重要なのは、ジェンガのタワーに実際に触れずしてその状況(ブロックをどのように動かせるか)を把握するのは不可能だという点だ。このため、人間と同様、視覚と触覚という2つの補完的な感覚を組み合わせる必要がある」と語っている。
ロボットは経験を重ねることで、ジェンガをより上手にプレイできるようになった(言い換えれば、不安定な状態にある物体をよりうまく操作するための方法を学んだ)。しかし、ロボットを教育するためにジェンガのタワーを何度も組み立てるのは、時間のかかる面倒な作業であるため、エンジニアらは少量のデータだけで済むアルゴリズムとアプローチを考え出したとFazeli氏は述べている。これによりロボットは、何万回ものタワーの組み立てを必要とする大量のデータセットを収集することなしに、300回程度の試行で学習を終えた。この効率的なアプローチでは、似たような振る舞いと結果をクラスタ化するようになっており、その後ロボットは、各データクラスタごとにモデルを作り出し、ブロックの見た目や感触から、そのブロックがどのように動くのかを予測したのだった。
このプロジェクトの目標は、ジェンガの達人を生み出すことではなく、人工知能(AI)が現実世界とやり取りする方法を向上させるというものだ。Fazeli氏は「これを産業での自動化に応用したいと考えている」と説明している。この技術は特に、ロボットによる組み立て作業や解体作業といった、部品をどのようにして配置すべきかを理解する必要のある作業で有用となるはずだ。
Fazeli氏は「ジェンガのブロック間での相互作用を取り扱うこのロボットが持つような、有用な抽象化能力と、視覚や触覚の領域で物理作用を推論する能力は、産業分野の現場でロボットが有用な操作スキルを効率的かつ迅速に学習できるようにするうえでの重要なステップとなる」と述べている。
この記事は海外CBS Interactive発の記事を朝日インタラクティブが日本向けに編集したものです。





