熊谷組とNECは、自然災害現場などの工事現場におけるネットワーク対応型無人化施工を想定した実証実験を実施した。その成果として、無人化施工VR(仮想現実)技術、360度映像および4K、2K映像の伝送をローカル5G(第5世代移動体通信システム)上で検証し、大容量・低遅延・多次元的な通信がリアルタイムに実施できることを確認できた。
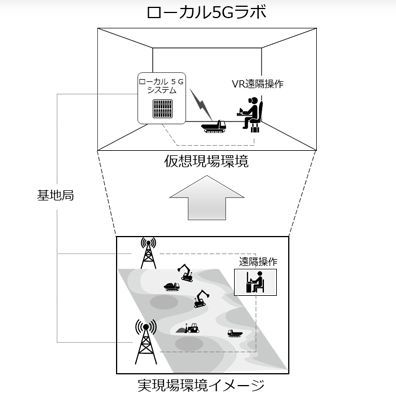
ローカル5Gラボ(仮想現場環境)での実験
実験では、建設機械の映像をVRヘッドマウントディスプレイ(HMD)に表示すると同時に、操縦席が取り付けられたモーションベースで建設機械の傾きや振動などの動きを再現した。映像に加え建設機械の傾きなど動きの情報を、ローカル5Gを活用して高品質かつリアルタイムに伝送することで、建設機械を傾斜地などで運用する場合でも、実際の搭乗操作に近い感覚で遠隔操作が可能となる。

ローカル5Gラボ内における実験の様子(重機模型操作中)
この実験はNECの玉川事業場(神奈川県川崎市)に設置したローカル5Gラボに仮想現場環境で実施された。システムは、オペレーターが装着するHMD、操縦席が取り付けられたモーションベース、360度カメラと加速度センサーが取り付けられた建設機械(重機模型で代用)で構成され、オペレーターは操縦席でHMDを装着し、建設機械を操作した。
熊谷組とNECは、サイバー空間とフィジカル空間を融合させたシステムにより、今後ICTを活用した無人化施工の実運用を目指す。





