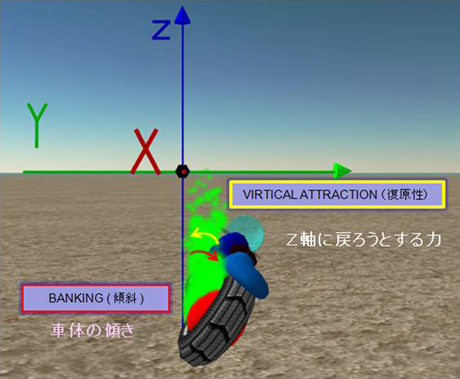
傾斜(BANKING)と復原性(VIRTICAL ATTRACTION)
また、「傾斜」によってその傾きをバイクの向き変える力へと変えてカーブを曲がったり、「復原性」によってZ軸へ引っ張られて態勢を立て直したりというような変換も存在する。
③「モーター」と「モーター以外の力」の挙動
(ア)「モーター」の挙動:減衰率(DECAY TIMESCALE)、速度(DIRECTION)、ずれ(OFFSET)
次に働く力はどのような挙動をするのか。「モーター」は「減衰率(DECAY TIMESCALE)」によって、「モーター」の力が働くなるまでの指数関数的な時間が設定される。また「速度(DIRECTION)」によって、直線方向、回転運動のモーター推進力を設定できる。さらに、「ずれ(OFFSET)」によってモーターの位置を設定できる。
(イ)「モーター以外の力」の挙動:性質(EFFICIENCY)、タイムスケール(TIMESCALE)、
「モーター」「モーター以外の力」にはそれぞれ、それが効果を達成するまでのタイムスケール(時間:TIMESCALE)が設定できる。さらに、「性質(EFFICIENCY)」によって、その力がどれくらい影響を与えるのか(強度)の設定も可能となる。
その他「llSetVehicleRotationParam」という関数もあるが、「VEHICLE_REFERENCE_FRAME」という定数のみ存在し、乗物の向きを設定することができる。
これで③〜⑨ブロックの大まかなパラメータの理解はできたと思う。詳細な設定などは、LSL Portalの「Vehicle」や日本語版LSL Wikiの「乗り物(Vehicles)」を参照して欲しい。
次回はいよいよ「changed ()」イベントへ突入しよう。それでは、次回もお楽しみに

大槻透世二サイバーアドベンチャー(株)
代表取締役社長/CEO
デジタルハリウッド大学院
次世代インターフェース研究室 研究員
Second Life研究室 研究員/プロデューサー
Linden社推薦 Second Lifeセミナー講師
東北大学心理学専攻卒業。1年間のLA留学を経て、ソリッドレイ研究所でバーチャルリアリティのシステムインテグレーション、立体映像システム構築、HMDシステム構築などを経験。IT系コンサルティング会社を経て、デジタルハリウッド大学大学院コンテンツマネジメント修士課程修了(MCA)。その後、Linden Lab本社にてSecond Lifeカリキュラムのトレーニングを受ける。現在デジタルハリウッドにて「Second Life」セミナーを開催。また、バーチャルリアリティ、メタバース関連のシステム開発/プロデュースを行うサイバーアドベンチャー(株)を設立し、そのCEO職に就いている。