3日目の招待講演(Invited Talk)は、元Google自動運転部門がスピンアウトした会社であるWaymoのDmitri Dolgov氏でした。
この講演では、自動運転の歴史からはじまり、自動運転を産業化していく上での技術的な課題としては“いかに正しく物体を認識・分類すること”が重要であること、また、これから自動運転が克服していかなければならない課題について講演されていました。
講演の中でも何度か言及されていたのですが「自分たちは自動車メーカーではなく、あくまで自動運転を行うソフトウェアを作る会社である」と主張されていたのが印象的でした。やはり西海岸らしくソフトウェアでいかに戦っていくかに焦点を置かれているのだなと感じました。
3日目・2件目の招待講演(Invited Talk)はテキサス大学のKristen Grauman准教授による講演でした。こちらは、大量の区別しやすいラベル付の画像から学習させるのではなく、 実際に動いている状況の動画から学習を行う方法についての講演でした。
モデリングとしては特に特徴量の“同値(equivariance)”という性質を仮定してモデリングしている点は、ウェブ系のデータを活用した機械学習ではなかなかお目にかからない、画像や動画の持つ数学的な美しい構造を久しぶりに感じることができました。
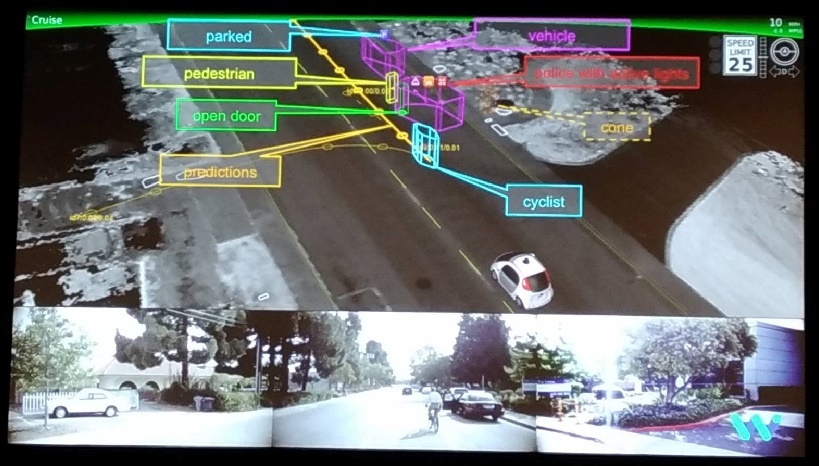
図:実際の自動運転車が歩行者・車・自転車などをどう認識しているか(筆者提供)
4日目の招待講演(Invited Talk)はMITのRuss Tedrake教授による講演でした。 現在はToyota Research Instituteのバイスプレジデントであり、さらにかつてはDARPA Robotics ChallengeのMITチームのリーダーだったとのことです。
この講演では、現在研究されている最適化問題としてのロボットの動きの定式化とその解き方などについての講演がありました。 この“最適化でロボットの運動を書く”方法はそのメインの潮流ではないものの、確実にその流れは来ているとのことで、最適化技術の活用先としては、ロボットの行動計画・運動制御・物体認識に使われているようです。
3日目のテクニカル・トラックでは、まず、「ML21: Data Mining and Knowledge Discovery」という講演トラックに参加しました。その理由は「Streaming Classification with Emerging New Class by Class Matrix Sketching」というタイトルの講演が非常に気にあったためです。
元になっている論文はコチラの模様。その内容は「既存のクラスの分類ができ、かつ、新たなクラスとして分類すべきデータを見つけられ、さらにストリーミングデータを活用しモデルの更新もできる」ような手法を提案しています。
まさに爆発的に増えている動画ベースのサービスへの応用が意識されたもので、非常に参考になりました。





