NECは、これまでロボットの専門家が人手で行っていたティーチング作業を自動化する人工知能(AI)技術「目標指向タスクプランニング」を開発した。ロボットを利用する現場の作業者が作業目標を指示するだけで、作業目標を達成する動作をロボットに自動実行させることが可能になり、作業変更が頻発し作業環境が変化しやすい現場でもロボット導入・活用が容易になる。

ロボット導入における「目標指向タスクプランニング」の効果
労働力不足の解決手段として、組立業や倉庫業、食品工場をはじめ、作業内容が週・日単位で頻繁に変更になる現場においてもロボット導入の検討が増えているという。ロボットに作業をさせるため、一般的には専門家によるロボット動作のティーチングが手動で行われており、特に物品の整列や箱入れなどのロボットにとって複雑な作業では、作業手順とロボットの動かし方を最適化するための試行錯誤が必要となっていた。そのため、作業変更が頻発する現場では、ロボットの導入あるいは継続的な活用が困難になりがちだった。
「目標指向タスクプランニング」では、ティーチングプロセスの自動化によりロボット稼働までの時間を大幅に短縮し、設定外の事象に自動で対応できる。
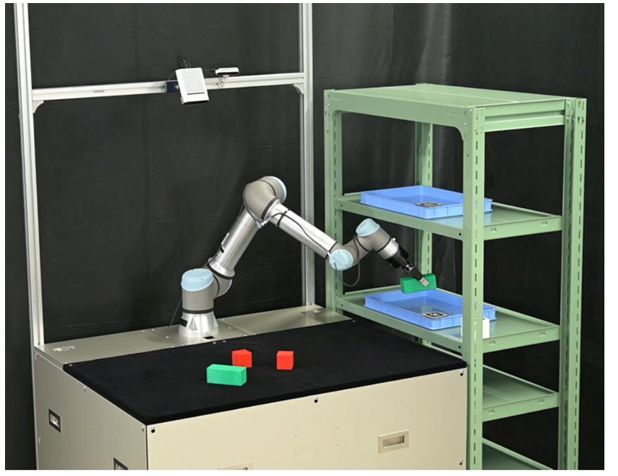
「目標指向タスクプランニング」技術を適用したピック&プレイス自動化ロボット
入荷部品の棚入れ作業の場合は、部品や棚の配置に応じた作業手順の作成およびロボット動作の設定に、専門家が人手で2〜3時間かけていたが、同技術により自動で数分程度に短縮できる。
またロボットを設定する場合、棚の付近や作業台に関係ない部材を混入させないなど、例外が発生しないように周辺環境を整えておくか、専門家がさまざまな状態を想定した作業手順を事前に設定しておく必要があった。しかし同技術により、設定外の事象があっても、作業目標の達成に向けた作業手順をその場で自動的に設定し直すため、ロボット用に特別に整備された環境を用意する必要がない。





