パナソニック コネクトは3月8日、物流倉庫内の効率化に向けて、クラウドロボティクスプラットフォームを提供するラピュタロボティクスと業務提携を締結したと発表した。同日開催の発表会では、提供を目指すソリューションを模したものが展示された。
パナソニック コネクトは、トラックドライバーの荷待ち時間を大幅に削減するオープンプラットフォーム「タスク最適化エンジン(仮称)」を開発し、同システムで利用可能なロボティクス技術を擁する企業との提携拡大を目指している。ラピュタロボティクスは1社目のパートナーとなる。
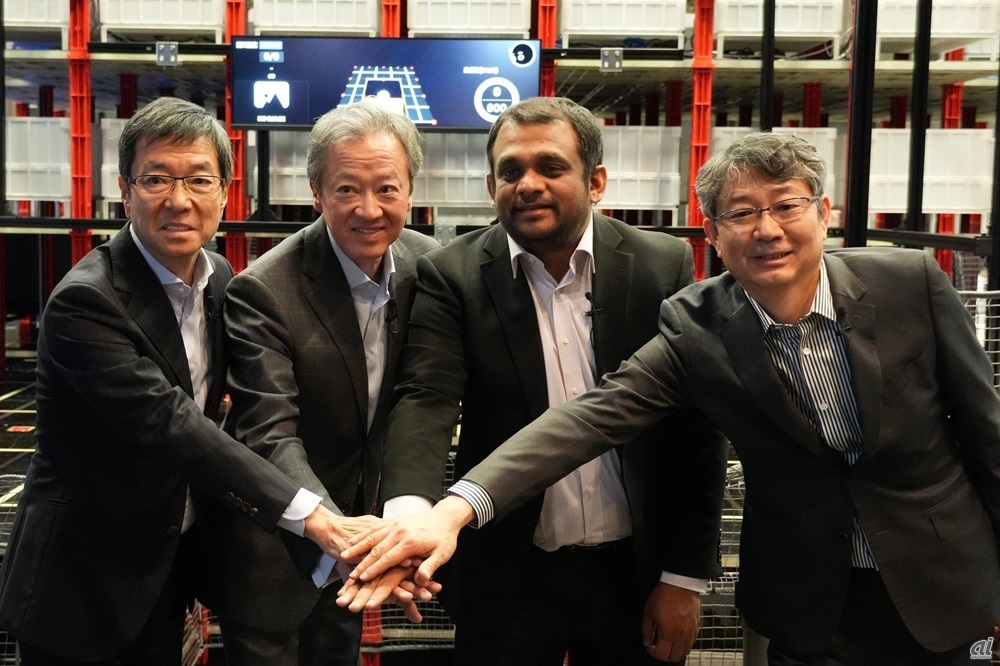
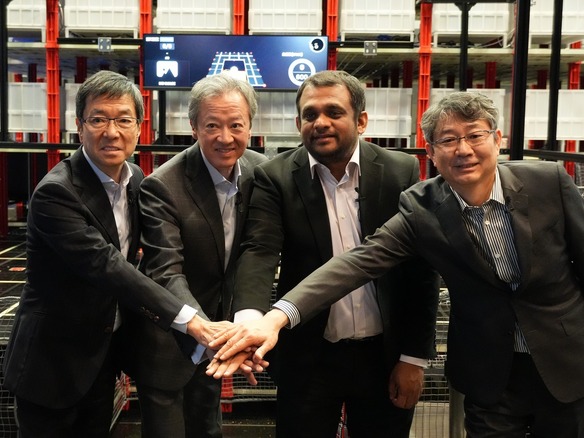
(左から)パナソニック コネクト 代表取締役 執行役員 プレジデント CEOの樋口泰行氏、執行役員 ヴァイス・プレジデント CTOの榊原彰氏、ラピュタロボティクス 代表取締役 CEOのモーハナラージャー・ガジャン氏、パナソニック コネクト 現場ソリューションカンパニー 現場サプライチェーン本部 エグゼクティブコンサルタント/エバンジェリストの一力知一氏
パナソニック コネクトは、サプライチェーンの本質的な課題として、ピッキングの終了時間が配達トラックの到着時刻と「同期」しておらず、ドライバーが待機しなければならない「荷待ち時間」が長引くことを指摘する。国土交通省が2021年度に実施した調査結果によると、荷待ち時間は平均1時間半以上に及ぶという。
同期が困難な理由には、日々変動する発注量、直前に行われる発注確定、短い納期などで計画の策定が困難であるほか、作業にかかる時間やピッキングの完了時間などを定量化できていないことが挙げられる。
今回の業務提携では、パナソニック コネクトの技術・インダストリアルエンジニアリング(IE)で「タスクの標準化」、ラピュタロボティクスの自動倉庫(Automated Storage and Retrieval System:ASRS)で「タスクの実行」、パナソニック コネクトのタスク最適化エンジンとロボット制御プラットフォームで「タスクの最適化」を支援し、作業時間を短縮することで同期の実現を図る。倉庫オペレーション全体の管理・可視化には、パナソニック コネクト傘下の米企業Blue Yonder(ブルーヨンダー)の倉庫管理システム(WMS)を活用する(図1)。
 図1:複数ソリューションの活用で目指す荷待ち時間の短縮
図1:複数ソリューションの活用で目指す荷待ち時間の短縮
※クリックすると拡大画像が見られます
IEは、ピッキングに必要な動きを細分化し、一つ一つにかかる秒数を算出・合計してピッキングにかかる時間を定義する。例えば、商品のバーコードを読んで確認する動きは1秒、出荷用の空ビン(専用コンテナー)に商品を移動させる動きは0.5秒を要するなどと算出する。
パナソニック コネクト 現場サプライチェーン本部 エグゼクティブコンサルタント/エバンジェリストの一力知一氏は「細かいと思われるかもしれないが、こうした動きは1日当たり約1万回行う。たった1秒のずれが1日で約3時間のずれになってしまう」と強調した。同社は長年、多品種小ロットの製品製造を通してIEの技術を培ってきたという。
ラピュタロボティクスは、2014年に設立されたスイス連邦工科大学チューリッヒ校(ETH Zurich)のスピンオフ企業。今回提供される「ラピュタ ASRS」では、複数のロボットが協調制御され、自走してピッキングステーションに到着する。作業者は歩き回ることなく業務に集中でき、大幅な作業時間の短縮が実現する。作業者の目の前にある画面ではイラストでピッキング情報を指示するほか、出庫/出荷用のビンを発光させることで、正確で素早い動きを可能にする(写真1)。

写真1:どのビンからどのビンに製品を移すのかを矢印で伝えている。対象のビンが光ることでミスを防ぐ
ラピュタ ASRSの枠組みは3つの部材のみで構成され、ねじを必要とせず自由に組み上げられる。これにより、短期間での導入や多様な倉庫の形・大きさに対応することが可能となる。
タスク最適化エンジンは、IEで標準化されたタスク情報を基に各タスクを振り分ける。その上で、トラックの出発時刻に間に合うよう、WMSの入出荷情報を基に適切な作業者/ロボット数と作業の順番を算出・実行する。トラックに積み込む荷物の順番は決まっているため、先に積み込む荷物から準備する。
ロボット制御プラットフォームは、ロボット関連機器の統合制御や現場の状況に応じた構成変更を可能にする。現場担当者は自身のデバイスでロボットの業務内容を設定したり、設置場所を変更したりでき、扱う製品や自動化する業務の変化に対応することが期待される。
業務提携で実現するソリューションは、2024年度中の提供を予定している。想定する顧客は、食品や日用品、医薬品など出荷頻度が高く、入れ替わりの激しい商材を扱う企業。既存の倉庫への導入を想定しており、オペレーションを止めないようラピュタ ASRSはモジュール型で提供する。大手企業は既に物流倉庫向けシステムを導入していることも想定されるが、目的や強みは異なるため共存可能だとする。顧客にはソリューションを個別に提案することを予定している。