「官民ITS構想・ロードマップ2016(案)」では、2015年の「官民ITS構想・ロードマップ2015」から大幅に改定し、2020年までの高速道路での自動走行(準自動パイロット)や、限定地域での無人自動走行移動サービスの実現を目指し、そのための工程表と具体的検討課題などを明記している。
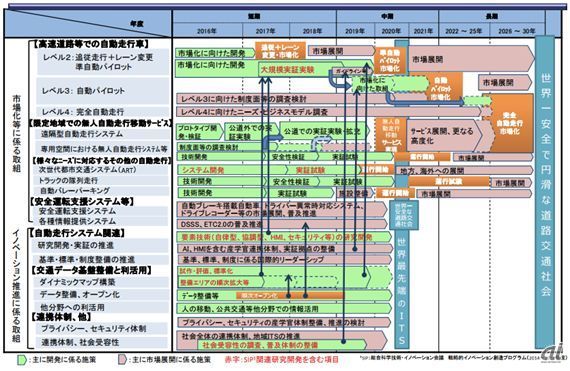
ロードマップ全体像 出所:官民ITS構想・ロードマップ2016(案)2016.5.20
自動走行システムを推進する背景には、交通事故の削減や交通渋滞の緩和、環境負荷の軽減などのより安全かつ円滑な道路社会の実現、運転の快適性向上や高齢者などの移動支援といったより多くの人が快適に移動できる社会の実現、そして、産業構造力の向上や関連産業の生産性向上などを挙げている。
また、IoTの進展などに伴うデータの流通構造の変化と、そのデータを基盤として活用するAIが、自動走行システムのコア技術として重要な位置づけになりつつある点に触れている。
政府では、自動走行システムの市場化やサービスの実現に向けて、
- 高速道路での自動走行車の市場化
- 限定地域での無人自動走行移動サービスの実現
を大きな柱としている。
高速道路での自動走行車の市場化では、準自動パイロット(レベル2)を 2020年までに実現、自動走行モード中は自動パイロット(レベル3)を2020年をめどに市場化が可能となるよう、大規模実証実験や制度面などの検討を進める。
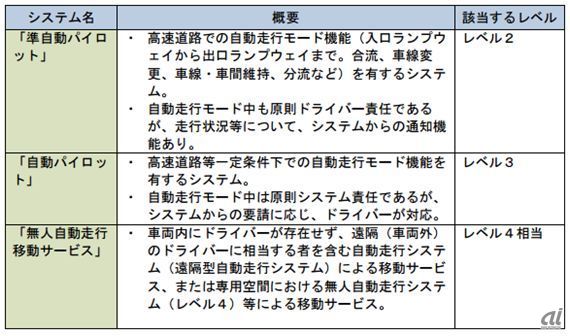
具体的な自動走行システムとその概要 出所:官民ITS構想・ロードマップ2016(案)2016.5.20





