
政府では、自動走行における競争・協調領域を戦略的に切り分けるための取組方針を示している。自動走行(レベル2〜5)の実現に向け、必要な技術などを抽出するとともに、各社が単独で開発・実施するにはリソース的、技術的に厳しい分野を考慮し、産学官が協調して戦略的に取り組む協調領域として、地図、通信インフラ、認識技術などの重要9分野を特定している。

<自動走行における戦略的に取り組む協調領域 重要9分野> 出所:自動走行ビジネス検討会報告書『自動走行の実現に向けた取組方針』 2017.3.14
重要9分野では、それぞれ2030年までのロードマップを策定している。高精度三次元地図(高速道路/一般道路)では、自動走行について必要な地図の仕様などを各社協調して明確化し、自動図化などのコスト低減を推進する。
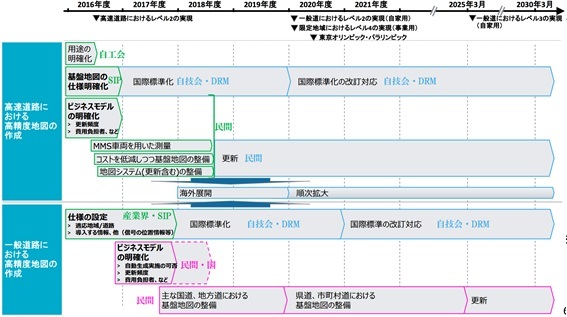
<高精度三次元地図(高速道路/一般道路)> 出所:自動走行ビジネス検討会報告書『自動走行の実現に向けた取組方針』 2017.3.14
2020〜2030年頃の実現が期待される自動走行のプロジェクトとして、トラックの隊列走行、ラストマイル自動走行(自宅と最寄り駅間の走行などを想定)、自動バレーパーキング(駐車の自動運転機能)の取り組みを推進する。
トラックの隊列走行では、ドライバー不足の解消や省人化、燃費改善などが期待されている。2017年度に後続有人システムを用いて、公道(新東名高速道路)で社会受容性の検証を実施し、2020年には高速道路においてトラックの隊列走行の実現を目指す。

<トラックの隊列走行の将来の実現イメージ> 出所:国土交通省 自動運転戦略本部 2017.3.29
地方での高齢者などの移動手段の確保するラストマイル自動走行では、2020年度の移動サービスの実現に向けて車両技術の開発を進めている。既存の小型カートに、誘導線検知、障害物対応、前走車追従のためのセンサなど自動走行に必要な技術を付加し、改造する。小型バスには、自動走行に必要な技術と、周辺を広範囲に認識するためのセンサ、ダイナミックマップなどを付加する。
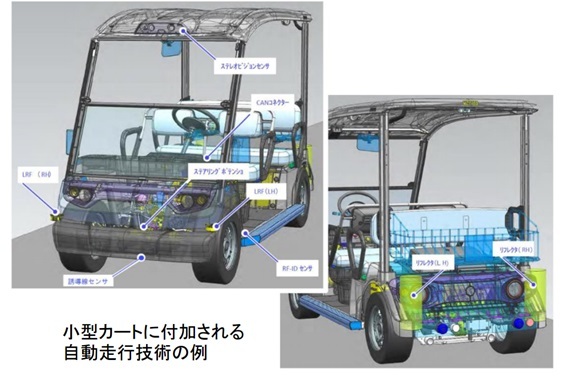
<小型カートに付加される自動走行技術の例> 出所:国土交通省 自動運転戦略本部 2017.3.29
自動運転に向けて、重要な位置づけとなるのがデータ基盤の整備だ。政府のIT総合戦略本部は2月9日「データ活用基盤・課題解決分科会 第3回道路交通ワーキングチーム」を開催し、自動運転の実現に向けたデータ基盤整備の方向などに関する検討を行ってる。
自動運転は、今後ますますデータ駆動型になり、人工知能(AI)を含むソフトウェア技術とそれを支えるデータ基盤が重要になる。自動運転に関するデータ基盤整備の戦略の方向を明確化すべきとして、「自動運転データ戦略」を策定する。
また、自動運転へのAIの活用・導入の本格化、コネクテッドカーの進展に伴う情報流通量の増大なども見据えた上で、自動運転を実現し、技術力を強化するためのデータ戦略の全体の方向を考える上で、以下の将来の自動運転システムのアーキテクチャ(イメージ)を示している。

<AI・ダイナミックマップを活用した自動運転システムのアーキテクチャ> 出所:データ活用基盤・課題解決分科会 第3回道路交通ワーキングチーム 2017.3.9





